
From the 1Université catholique de Louvain, Secteur des Sciences de la Santé, Institut de Recherche Expérimentale et Clinique, Neuro musculo skeletal Lab (NMSK), 2Cliniques universitaires Saint-Luc, Service de médecine physique et réadaptation, Brussels, 3Université catholique de Louvain, Centre de Recherche en Energie et Mecatronique (CEREM) and 4Université catholique de Louvain, Louvain Bionics, Louvain- la-Neuve, Belgium
Objective: To assess the capacity of the robotic device REAplan to measure overall upper limb peak resistance force, as a reflection of upper limb spasticity.
Methods: Twelve patients with chronic stroke presenting upper limb spasticity were recruited to the study. Patients underwent musculocutaneous motor nerve block to reduce the spasticity of elbow flexor muscles. Each patient was assessed before and after the motor nerve block. Overall the REAplan measured upper limb resistance force. The robot passively mobilized the patient’s upper limb at various velocities (10, 20, 30, 40 and 50 cm/s) in a back-and-forth trajectory (30 cm). The peak resistance force was analysed for each forward movement. Ten movements were performed and averaged at each velocity condition.
Results: The overall upper limb resistance force increased proportionally to the mobilization velocity (p < 0.001). Resistance force decreased after the motor nerve block at 40 and 50 cm/s (p < 0.05). Overall upper limb resistance force results showed excellent correlation with the Modified Ashworth Scale for elbow flexor muscles, for each velocity condition equal or higher than 30 cm/s (ρ >0.6).
Conclusion: This study proposes a new, valid, reliable and sensitive protocol to quantify upper limb resistance force using the REAplan, as a reflection of upper limb spasticity.
Key words: stroke; upper extremity; robotics, muscle spasticity; symptom assessment.
Accepted May 11, 2017; Epub ahead of print xx
J Rehabil Med 2017; 49: 565–571
Correspondence address: Gaëtan Stoquart, Université catholique de Louvain, Cliniques universitaires Saint-Luc, Service de Médecine et Réadaptation, Avenue Hippocrate 10, Bte B2, BE-1200 Brussels, Belgium. E-mail: geatan.stoquart@uclouvain.be
Spasticity is a disorder that develops following a lesion of the central nervous system and is one of the clinical signs of upper motor neurone syndrome. Several definitions of spasticity exist, the most common being Lance’s definition (1): “a motor disorder characterised by a velocity-dependent increase in tonic stretch reflexes (muscle tone) with exaggerated tendon jerks, resulting from hyper-excitability of the stretch reflexes”. Upper limb spasticity frequently interferes with activities of daily living, affecting the active and passive functions of the paretic arm.
The assessment of spasticity is essential to guide upper limb rehabilitation of stroke patients. Muscle spasticity can be assessed using different methods. On the one hand, the Modified Ashworth Scale (MAS) and Modified Tardieu Scale (MTS) are the most common methods used in clinical practice and research (2–5). These scales are based on clinical assessment. However, their validity and reliability have been criticized. The MAS is an ordinal and subjective scale that assesses spasticity during a passive movement at a single velocity. This velocity is difficult to control precisely, leading partly to poor intra- and inter-observer reliability (6). The MTS requests passive stretching of the upper limb at slow and fast, rater-dependent, velocities. This scale is clinically useful to assess spasticity associated with clonus. However, measurement of the catch angle has demonstrated insufficient reliability (5). On the other hand, spasticity can be assessed objectively using isokinetic dynamometers (7–9) or electromyography (EMG) (10, 11). Isokinetic dynamometers enable measurement and computation of the resistance force (RF) and muscle stiffness during mobilization at a constant velocity (7–9), and the EMG method enables measurement of the electrical activity of the muscle and quantification of the stretch reflex (10, 11). However, EMG data can be affected by several factors (placement of the electrodes, muscle atrophy, skin resistance, etc.) (7). These quantitative and objective methods require technological skills and equipment and can only assess a limited number of muscles.
It has been widely shown that robotic systems can be useful in the rehabilitation of adults and children with brain damage (12, 13). Moreover, these systems can be used to assess the function of the upper limbs during treatment. Upper limb kinematics has been used to provide an objective and quantitative evaluation of arm movements (14, 15). The results are complementary to those obtained from clinical scales. Kinematic indices can also be used to tailor the therapeutic exercises provided by the robot to the specific needs of the patient (16). As for kinematics, spasticity can also be included in robotic assessment protocols, as it limits the speed and direction of active movements of the upper limb.
The aim of the present study was to validate the assessment of spasticity using the robot REAplan to measure upper limb RF. To reach this objective, we studied different psychometric properties:
A convenience sample of 12 stroke patients participated in the study. Inclusion criteria were: adult (> 18 years), a stroke diagnosis confirmed by magnetic resonance imaging, spasticity of the elbow flexor muscles (MAS > 0), and the ability to understand instructions and carry out all study tests. Exclusion criteria were any other neurological or orthopaedic illness limiting passive or active upper limb movements.
The patients’ characteristics are shown in Table I. All patients were volunteers, who participated freely in the study and provided written informed consent. The study was approved by the regional Ethics Committee of the Cliniques universitaires Saint-Luc and Université catholique de Louvain in Brussels.
Table I. Characteristics of patients (n = 12)
The patients were assessed during 3 sessions: before the MNB (T0), 1 h after the MNB (T1) and 1 day after the MNB (T2). Each session included a clinical and a robotic assessment performed by the same physical therapist, who did not perform the MNB.
Clinical assessment included the MAS, to assess elbow flexor muscles tone (2), and the Medical Research Council (MRC) grading system to assess elbow flexor muscle strength (17).
REAplan (Fig.1) is a distal end-effector robot that allows movements of the upper limb by mobilization of the hand in the horizontal plane. Movements of REAplan can be achieved in different modes (active/active-passive/passive). A screen is placed in front of the patient to provide him/her with a visual feedback of his/her mobilization. The robot is equipped with force sensors (strain gauges) and position sensors to record the position of the handle and the force exerted on the handle over time.
Fig. 1. (A) REAplan robot. (B) Positioning of the hand in the glove. (C) Forearm in the gutter.
The position of the patients was standardized and ergonomic. They were seated on a chair with the angle between the trunk and the hips maintained at 120° to reduce lower back stress. When necessary, they could rest their feet on a footrest to ensure greater stability. The patient’s trunk was strapped to the back of the chair to limit compensatory movements. The distal end-effector was placed in front of the subject (18). Depending on his/her ability, each patient had his/her hand attached with a glove to the distal end-effector (Fig. 1) or his/her forearm fixed in a gutter (Fig.1) to increase stability of the paretic wrist and forearm.
The task consisted of the distal end-effector moving backward and forward, inducing passive upper limb flexion and extension movements. The movements were performed in a straight, unidirectional line, in front of the patient, with an amplitude of 30 cm. The patients were asked to relax and to allow their arm to be moved by the robot. The robot mobilized the upper limb 10 times consecutively at each of 5 different velocities, with 1-min rest period between each velocity condition (10, 20, 30, 40 and 50 cm/s). The velocity was constant over a distance of at least 26 cm and the order of velocities was randomized.
Parameters. The position of the end-effector and the force exerted on the end-effector were recorded (frequency = 125 Hz).
For each forward movement (elbow extension movement), peak RF (Newton) was measured to represent the spasticity of the elbow flexor muscles. The mean peak RF for the 10 repetitions was computed. Since the end-effector movement mainly induces elbow movement, the RF is primarily determined by the elbow flexor muscles. However, shoulder and wrist and accessory elbow flexor muscles (such as pronator teres and flexor digitorum superficialis) can also be stretched during the mobilization and contribute to RF. The computed RF was then expressed as “an overall upper limb” RF. Note that finger flexor muscles were not totally stretched during the mobilization, as the hand was tied to the end-effector.
To decrease the spasticity of the biceps brachii and brachialis, a musculocutaneous MNB was performed by an experienced specialist after the first assessment. Needle placement was guided by electrical stimulations and anatomical landmarks (19). The nerve was located under the end of the pectoralis major tendon in the armpit, with the arm in abduction and external rotation. The injection was performed when a muscle response was observed with an electrical stimulation less than 10 mA and lasting 0.01 ms. Three to four ml 1% lidocaine were injected, depending on the patient’s degree of spasticity. The delay in action of a lidocaine MNB is 10–15 min and its remains effective for 1–3 h (19).
Statistical analyses were performed using the SigmaStat 3.5 software (WPCubed GmbH, Munich, Germany).The normality and equality of variances were checked by the Shapiro-Wilk and Brown-Forsythe statistical tests, respectively; the significance level was fixed at 0.05. For each analysis, data were normal and the variances were equivalent.
To study the validity of our robot measurement, correlation between the velocity and RF was analysed using a Pearson correlation. A Pearson coefficient between 0.9 and 1.00 was classified as very strong (20). Correlations between the MAS and RF assessed at velocities of 10–50 cm/s were analysed using Spearman’s correlation. Spearman’s coefficient was classified as follows: 0.5–0.75 = moderate and 0.75–1 = strong correlation (21). The reliability of measurements during the 10 cycles was analysed using a repeated measures analysis of variance (ANOVA) and the intraclass correlation coefficient (ICC) for each velocity. To evaluate the sensitivity of RF assessed by the robot, a 2-factor repeated measure ANOVA was used (velocity×processing time). If this test showed an interaction, it was further analysed with a post-hoc test (Holm Sidak).
All patients completed the 3 sessions with full collaboration and no adverse events. The results are shown in Table II.
Table II. Upper limb resistance force (RF) and Modified Ashworth Scale for each processing time and for each velocity
Fig. 2 shows a typical trace of patient’s upper limb mobilization at 50 cm/s. The RF increased regularly during the extension movement and 1 RF peak was observed, at a mean of 28.3 cm of distance. Note that patients reached peak RF at a mean of 26.3 cm (standard deviation (SD) 1.4 cm).
Fig. 2. (A) A typical trace of 10 mobilizations through 30 cm; 0–30 represents the forward movement and 30–0, the backward movement. Part B is a typical trace of a patient’s resistance force during mobilization at a velocity of 40 cm/s. A positive force is a force going in a direction from the patient to the distal mobilization point. A negative force is a force going in the opposite direction (from the distal mobilization point to the patient). Filled lines represent the beginning and the end of each movement. Dashed lines represent the end of the forward (extension) movement.
The results of the RF assessment for the paretic arm at each velocity are shown in Table II and Fig. 3. Upper limb RF increased significantly (p < 0.001) between successive velocities up to 40 cm/s. The slight increase in RF between 40 and 50 cm/s was not significant. There was a strong correlation between the velocity and RF (r = 0.99; p < 0.001).
Fig. 3. Mean and standard deviation of upper limb resistance force (RF) of all patients at 5 different velocities. *Significant difference of mean RF between velocities (p < 0.05) analysed by repeated measures analysis of variance (ANOVA).
Fig. 4 shows the “upper limb RF” as a function of the elbow flexor muscle MAS at the lowest (10 cm/s) and highest velocities (50 cm/s). The correlation between the upper limb RF and the MAS increased with velocity, from a trend at 10 cm/s (ρ = 0.5, p = 0.09) to a significant, but moderate, correlation at 20 cm/s (ρ = 0.63, p = 0.03) to a strong correlation at velocities equal to or greater than 30 cm/s (30 cm/s, ρ = 0.79, p = 0.001; 40 cm/s, ρ = 0.76, p = 0.003; 50 cm/s, ρ = 0.76, p = 0.003).
Fig. 4. Illustrations of upper limb resistance force as a function of elbow flexor muscle Modified Ashworth Scale. (A) is at 10 cm/s and (B) is at 50 cm/s. Each point on the figure represents a patient.
RF for each cycle were analysed to determine the variability in RF. No differences were found among the 10 repetitions at any velocity (p = 0.94). These findings were verified by measurement of the ICC, which was greater than 0.93 for each velocity (p < 0.001).
The MAS score decreased significantly (p < 0.005) after the musculocutaneous MNB and returned to baseline by the third assessment (p < 0.005) (Table II).
Quantitative results assessed by REAplan also demonstrated the effect of the assessment time (T0; T1; T2) on RF, as shown in Table II and Fig. 5. RF decreased significantly (p = 0.017) 15 min after injection, but only at 40 and 50 cm/s. A significant increase in RF (p < 0.05) was noticed during the third assessment compared with the second assessment, at 40 and 50 cm/s.
Fig. 5. Upper limb resistance force for each movement velocity in 3 different conditions. Mean upper limb resistance force (RF) of all patients for each assessment time at 5 velocities. Each bar represents means of all patients and standard deviation. Grey bars represent the upper limb RF before the musculocutaneous motor nerve block (MNB) (T0). White bars are within the first hours after the MNB (T1) and the black bars are 1 or 2 days after the MNB (T2). *Significant difference in mean RF between each assessment (T0–T1–T2) (p < 0.05).
REAplan allows the measurement of upper limb RF during passive extension movement, which reflects the spasticity of the upper limb muscles. Indeed, REAplan showed a good correlation with clinical spasticity score (MAS) and a good responsiveness to spasticity variations.
The results of this study show that the greater the velocity of movement, the greater the RF of the paretic arm. This finding is in agreement with Lance’s definition of spasticity (1). Most quantitative assessments of spasticity have been performed on the lower limb using an isokinetic device or EMG. For the upper limb, a study by Cousins et al (10). quantified elbow spasticity with EMG measurements in a case report and showed that spasticity was more marked at high velocities (22–108°/s) than at low velocities (3–17°/s) (10). Pisano et al. observed that 50 of 53 patients with stroke had a stretch reflex on the wrist flexor muscle at a velocity of 100°/s (9). It is difficult to compare the velocities used in some other studies with ours because the method of reporting varies, with velocity sometimes expressed as angular velocity (°/s) depending on the patient’s arm length, and sometimes as linear velocity (cm/s).
There was a strong correlation (ρ >0.75) between elbow flexor MAS and upper limb RF assessed by REAplan at a velocity equal to or greater than 30 cm/s. For a MAS assessment, it is recommended that the limb is extended from maximum flexion to maximum extension in 1 s (2), which is equivalent to a velocity of approximately 30 cm/s in this study. The fact that the correlation between the MAS and RF increased until a velocity of 30 cm/s was expected, because this was the velocity closest to the velocity recommended for the MAS assessment. Similar results were reported by Pisano et al. (9). These authors found a strong correlation between the MAS and total wrist stiffness assessed by an isokinetic dynamometer at high velocity (200°/s). By contrast, Pandyan et al. noted poor correlation between elbow resistance to passive movement and the MAS (22). As shown by Pisano et al., quantification of spasticity using EMG does not seem to correlate well with the MAS assessment (7) for wrist flexor muscle spasticity (9). This observation could be explained by the variability in the EMG responses in the population or by poor validity and reliability of the MAS (7).
In the present study, the upper limb was mobilized along a distance of 30 cm independently to the patient’s morphology. The tallest patient had an elbow angle of 130° at the end of the mobilization. Knowing that the catch angle is reached at a mean of 102.9° (SD 11.9°) (23), the catch angle should be reached for all patients. It is supported by the fact that a peak force was observed in all patients before the end of extension movement.
There was no difference in RF during the 10 repetitions, so it can be assumed that patients were well relaxed and it should be possible to assess upper limb RF using less than 10 mobilizations; in our opinion, 3 mobilizations are enough. The results also showed no effect of mobilization on spasticity, which can be explained by the low number of repetitions or the relatively low movement speed (24).
The MAS and the REAplan can detect a decrease in upper limb RF following musculocutaneous MNB, illustrating their responsiveness. This effect of the MNB on the muscle tone assessed by the MAS has been demonstrated in many studies (3, 4, 25). These effects have been confirmed by quantitative assessment using an isokinetic dynamometer or EMG (8, 10, 11) but never using a rehabilitation robot. In our study, RF decreased significantly (p < 0.05) after the MNB at velocities equal to or greater than 40 cm/s, which means that upper limb RF should be assessed at this minimum velocity. As shown in the results section, the peak RF was only decreased, and not abolished. The objective of the injection was, indeed, to obtain such an incomplete block, to allow the patient to keep some strength, and assess the functional benefit of the chemodenervation. There are 2 other explanations for the persistence of spasticity. First, the musculocutaneous nerve does not supply all elbow flexor muscles. Notably, the brachioradialis and the accessory elbow flexor muscles, which are innervated by the radial nerve and median nerve. Secondly, the RF could also be related to joints and soft tissue modifications. Thus, the brachio-radialis alone is not sufficient to explain the upper limb RF. All these findings illustrate that the REAplan could be a sensitive tool to assess evolution of RF during treatment.
This study has several limitations. First, the sample size is quite small. However, this number of participants was sufficient for a feasibility study. Secondly, the muscle relaxation was not verified. Patients were asked to relax and to be passively mobilized. The high reproducibility of the RF suggests that no voluntary contractions disturbed the measurements, as such contractions would imply greater variability (26). Finally, this tool assessed overall upper limb RF and not segmental RF. Wrist, elbow and shoulder spasticity are taken into account. This is the only option when using an end-effector robot, because it applies one force on the hand, whereas an exoskeleton robot can control several joints individually. Although some treatments require the assessment of specific muscle groups or specific joints, the overall RF measurement corresponds more to activities of daily living, in which the whole upper limb is involved.
Robotics systems are mainly used to assist the rehabilitation of adults and children with brain damage (12, 13). The exercise protocols using robots could take spasticity into account. Indeed, upper limb RF could be measured during the rehabilitation session in order to adapt and optimize the rehabilitation. For example, the robot could mobilize the patient’s upper limb slowly and passively if there was a marked degree of spasticity.
This study proposes a new protocol to quantify upper limb spasticity by measuring overall upper limb RF using the REAplan. This protocol should be included in robotic-assisted rehabilitation programmes in order to continuously adapt exercises to the patient’s performance.
This work was supported by the Région Wallonne, the Fondation Motrice and the Fondation Saint-Luc. The authors would also like to thank Sophie Heins for helping to analyse the results, and all the subjects for their participation in this study.


 Click to show fullsize
Click to show fullsize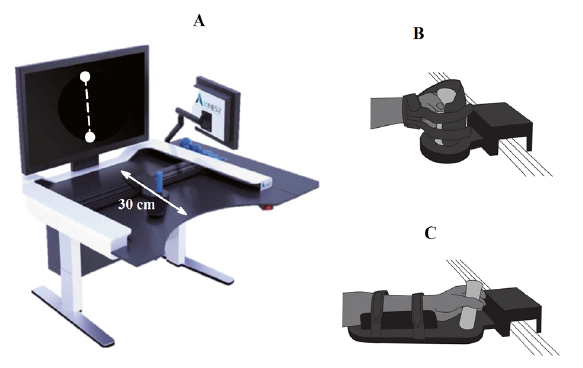 Click to show fullsize
Click to show fullsize Click to show fullsize
Click to show fullsize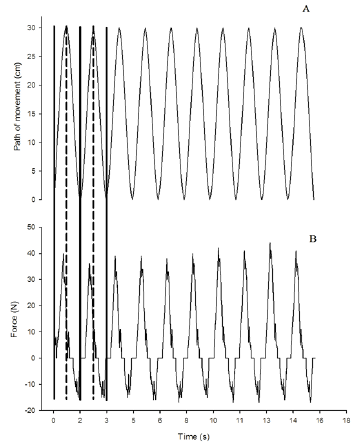 Click to show fullsize
Click to show fullsize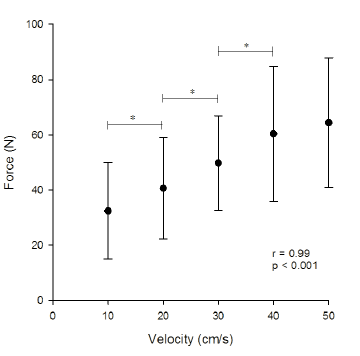 Click to show fullsize
Click to show fullsize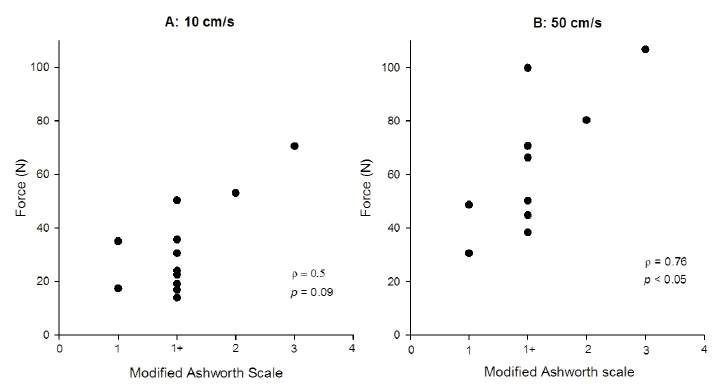 Click to show fullsize
Click to show fullsize Click to show fullsize
Click to show fullsize